
机器视觉在软包动力锂电池极耳焊接缺陷检测中有广泛的应用。通过使用机器视觉技术,可以实现自动化的、高效率的缺陷检测和质量控制。
机器视觉系统可以对焊接过程中的极耳进行实时监测和检测。它可以通过图像处理算法来提取和分析焊接区域的特征,例如焊接点的形状、大小、位置和颜色等。通过比较预设的标准或模型,机器视觉系统可以确定是否存在缺陷,例如焊接不完整、偏位、断裂或异常等。
机器视觉系统还可以检测焊接质量以及其他可能引起缺陷的因素。它可以检测焊接接头的表面质量,例如气孔、裂纹、变形等,并将其与标准进行比较。此外,机器视觉系统还可检测焊接工艺参数的合理性,例如焊接温度、压力和速度等,以确保焊接过程的一致性和稳定性。
本文总结了极耳焊接几种常见的缺陷,并描述各缺陷的特征,为后续机器的图像处理和分类识别做准备。
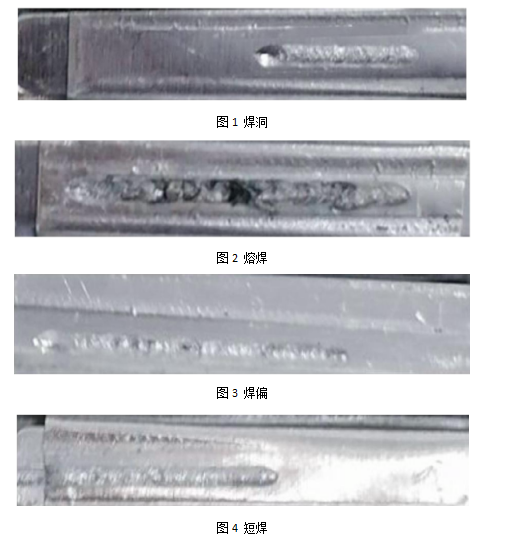
焊洞:由于离焦量选择不合适,导致局部功率密度过高,由此造成焊穿。
熔焊:此缺陷往往是由于焊接速度不匹配,使得极耳表面受热不均匀造成的通常表现为缺陷面积更大,且形状不规则,需要精调焊接速度。
焊偏:是由于激光焊头没能与待焊接极耳中心线保持平行造成的,偏离了极耳的中心线。应及时调整激光焊头的位置角度,避免后续的焊接依次偏离。
断焊(短焊):通常由于机械械上下振动,使得焊接不连续,造成断焊缺陷。应检查机构滤震性,增加缓冲措施缺陷特征表现为焊缝岀现间断,不连续,或者焊缝较短。
极耳焊缝的图像分割是指将图像中的焊缝部分与其他背景区域进行准确的分离和提取。以下是一些常用的极耳焊缝图像分割方法:
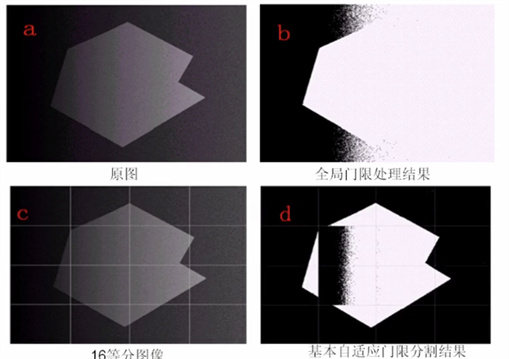
基于阈值分割:这是最简单且常用的分割方法之一。通过选取适当的阈值,将图像中的像素分为焊缝区域和背景区域。可以根据焊缝的颜色、亮度或灰度值等特征来确定阈值。
基于边缘检测:利用边缘检测算法,如Canny、Sobel等,可以提取焊缝边缘轮廓。然后根据边缘信息进行区域分割,将焊缝区域与背景区域分开,基于图像学习:使用机器学习算法,如卷积神经网络(CNN)等,对包含焊缝和背景的训练样本进行学习。然后将训练好的模型应用于新的图像,实现焊缝的准确分割。
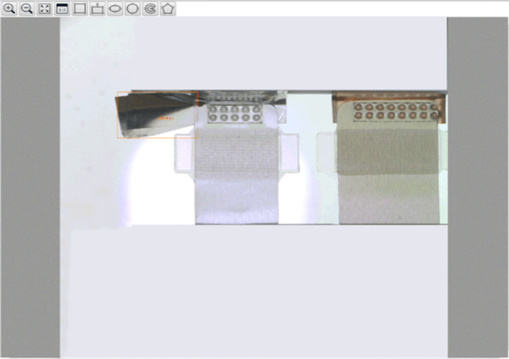
图6 OPT深度学习极耳裁切边缘检测
基于分水岭算法:这是一种基于图论的分割方法。通过计算图像中像素之间的距离或相似度,将图像分割为多个区域。然后利用分水岭算法对不同区域进行分割,将焊缝与背景分离。
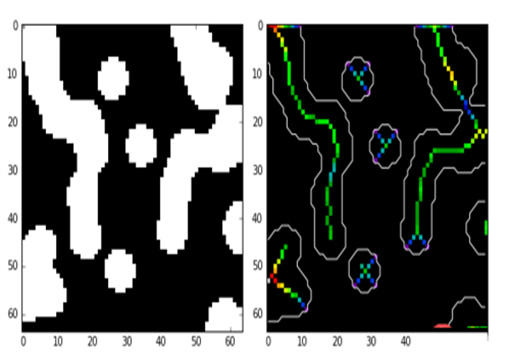
图7 图像处理之骨架提取与分水岭算法
最后采用 OTSU阈值分割法,实现快速分割。具体实现步骤具体如下
(1) 读取原图像,进行灰度变换,得到灰度图像
(2) 采用中值滤波,保留边缘的同时去除椒盐噪声
(3) 根据焊缝结构特点,设定结构元素,进行多尺度对比度提升
(4) 在(3)基础上,进行形态学混合开闭重建,屏蔽干扰信息,保证焊缝完整性同时进一步增强焊缝目标与背景的对比度
(5) 最后,采用OTSU阈值分割方法,进行焊缝目标提取。
图8 普通形态学(左) 阈值分割法(右)
本文重建方法的增强效果显著,能使焊缝有效分割出来,剔除了其他干扰信息;其他方法则不能将焊缝目标与背景分离,仍存在干扰,不利于后续的缺陷检测。

